knn_euclid: Euclidean Nearest Neighbours¶
Description¶
If Y is NULL, then the function determines the first k nearest neighbours of each point in X with respect to the Euclidean distance. It is assumed that each query point is not its own neighbour.
Otherwise, for each point in Y, this function determines the k nearest points thereto from X.
Usage¶
knn_euclid(
X,
k = 1L,
Y = NULL,
algorithm = "auto",
max_leaf_size = 0L,
squared = FALSE,
verbose = FALSE
)
Arguments¶
|
the “database”; a matrix of shape \(n\times d\) |
|
requested number of nearest neighbours |
|
the “query points”; |
|
|
|
maximal number of points in the K-d tree leaves; smaller leaves use more memory, yet are not necessarily faster; use |
|
whether the output |
|
whether to print diagnostic messages |
Details¶
The implemented algorithms, see the algorithm parameter, assume that \(k\) is rather small.
Our implementation of K-d trees (Bentley, 1975) has been quite optimised; amongst others, it has good locality of reference (at the cost of making a copy of the input dataset), features the sliding midpoint (midrange) rule suggested by Maneewongvatana and Mound (1999), node pruning strategies inspired by some ideas from (Sample et al., 2001), and a couple of further tuneups proposed by the current author. Still, it is well-known that K-d trees perform well only in spaces of low intrinsic dimensionality. Thus, due to the so-called curse of dimensionality, for high d, the brute-force algorithm is recommended.
The number of threads is controlled via the OMP_NUM_THREADS environment variable or via the omp_set_num_threads function at runtime. For best speed, consider building the package from sources using, e.g., -O3 -march=native compiler flags.
Value¶
A list with two elements, nn.index and nn.dist, is returned.
nn.dist and nn.index have shape \(n\times k\) or \(m\times k\), depending whether Y is given.
nn.index[i,j] is the index (between \(1\) and \(n\)) of the \(j\)-th nearest neighbour of \(i\).
nn.dist[i,j] gives the weight of the edge {i, nn.index[i,j]}, i.e., the distance between the \(i\)-th point and its \(j\)-th nearest neighbour, \(j=1,\dots,k\). nn.dist[i,] is sorted nondecreasingly for all \(i\).
References¶
J.L. Bentley, Multidimensional binary search trees used for associative searching, Communications of the ACM 18(9), 509–517, 1975, doi:10.1145/361002.361007
S. Maneewongvatana, D.M. Mount, It’s okay to be skinny, if your friends are fat, 4th CGC Workshop on Computational Geometry, 1999
N. Sample, M. Haines, M. Arnold, T. Purcell, Optimizing search strategies in K-d Trees, 5th WSES/IEEE Conf. on Circuits, Systems, Communications & Computers (CSCC’01), 2001
See Also¶
The official online manual of quitefastmst at https://quitefastmst.gagolewski.com/
Examples¶
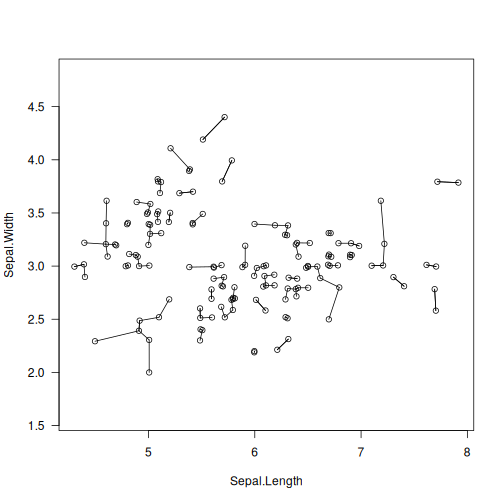
library("datasets")
data("iris")
X <- jitter(as.matrix(iris[1:2])) # some data
neighbours <- knn_euclid(X, 1) # 1-NNs of each point
plot(X, asp=1, las=1)
segments(X[,1], X[,2], X[neighbours$nn.index,1], X[neighbours$nn.index,2])
knn_euclid(X, 5, matrix(c(6, 4), nrow=1)) # five closest points to (6, 4)
## $nn.index
## [,1] [,2] [,3] [,4] [,5]
## [1,] 15 19 16 34 86
##
## $nn.dist
## [,1] [,2] [,3] [,4] [,5]
## [1,] 0.2159604 0.3682194 0.4916704 0.5240702 0.6041195